Prácticos circuitos para encender sensores. Sensores analógicos: aplicación, formas de conexión al controlador Conexión de sensores con diferentes niveles de potencia
Desde la década de 1950, el bucle de corriente se ha utilizado para transmitir datos de transductores de medición con fines de supervisión y control. Con un bajo costo de implementación, alta inmunidad al ruido y la capacidad de transmitir señales a largas distancias, el bucle de corriente resultó ser especialmente conveniente para trabajar en condiciones industriales. Este material está dedicado a la descripción de los principios básicos del bucle de corriente, los conceptos básicos del diseño, la configuración.
Usando corriente para transferir datos desde el inversor
Los sensores industriales a menudo usan una señal de corriente para transmitir datos, a diferencia de la mayoría de los otros transductores, como termopares o galgas extensométricas, que usan un voltaje de señal. A pesar de que los convertidores que utilizan el voltaje como parámetro de transferencia de información se utilizan efectivamente en muchas tareas industriales, hay una serie de aplicaciones en las que es preferible el uso de características de corriente. Una desventaja significativa cuando se usa voltaje para la transmisión de señales en condiciones industriales es el debilitamiento de la señal durante su transmisión a largas distancias debido a la presencia de resistencia de las líneas de comunicación por cable. Por supuesto, puede utilizar la alta impedancia de entrada de los dispositivos para evitar la pérdida de señal. Sin embargo, estos dispositivos serán muy sensibles al ruido generado por motores cercanos, correas de transmisión o transmisores de transmisión.
Según la primera ley de Kirchhoff, la suma de las corrientes que fluyen hacia un nodo es igual a la suma de las corrientes que salen de un nodo.
En teoría, la corriente que fluye al principio del circuito debería llegar a su final por completo,
como se muestra en la Figura 1. 1.
Figura 1. De acuerdo con la primera ley de Kirchhoff, la corriente al comienzo del circuito es igual a la corriente al final.
Este es el principio básico sobre el que funciona el bucle de medición: medir la corriente en cualquier lugar del bucle de corriente (bucle de medición) da el mismo resultado. Al utilizar señales de corriente de baja impedancia y receptores de adquisición de datos, las aplicaciones industriales pueden beneficiarse enormemente de una mejor inmunidad al ruido y una mayor longitud del enlace.
Componentes del bucle de corriente
Los componentes principales del bucle de corriente incluyen una fuente de alimentación de CC, un transductor primario, un dispositivo de adquisición de datos y cables que los conectan en una fila, como se muestra en la Figura 2.
Figura 2. Diagrama funcional del bucle de corriente.
Una fuente de alimentación de CC proporciona energía al sistema. El transmisor regula la corriente en los cables en el rango de 4 a 20 mA, donde 4 mA representa un cero vivo y 20 mA representa la señal máxima.
0 mA (sin corriente) significa un circuito abierto. El recolector de datos mide el valor de la corriente regulada. Un método eficaz y preciso de medir la corriente es instalar un resistor-shunt de precisión en la entrada del amplificador de medición del dispositivo de adquisición de datos (en la Fig.2) para convertir la corriente en un voltaje de medición con el fin de obtener finalmente un resultado que Refleja sin ambigüedades la señal a la salida del convertidor.
Para ayudarlo a comprender mejor el principio del bucle de corriente, considere, por ejemplo, el diseño de un sistema con un convertidor, que tiene lo siguiente especificaciones:
El transductor se utiliza para medir la presión.
Transmisor ubicado a 2000 pies del dispositivo de medición
La corriente medida por el recolector de datos proporciona al operador información sobre la cantidad de presión aplicada al transmisor.
Comencemos con la selección de un convertidor adecuado.
Diseño del sistema actual
Selección de convertidor
El primer paso para diseñar un sistema actual es elegir un convertidor. Independientemente del tipo de valor medido (caudal, presión, temperatura, etc.), un factor importante a la hora de elegir un transmisor es su tensión de funcionamiento. Solo la conexión de la fuente de alimentación al transductor permite regular la cantidad de corriente en la línea de comunicación. El valor de voltaje de la fuente de alimentación debe estar dentro de límites aceptables: más que el mínimo requerido, menos que el valor máximo, lo que puede provocar daños en el inversor.
Para el sistema de corriente que se muestra en el ejemplo, el transductor seleccionado mide la presión y tiene un voltaje de funcionamiento de 12 a 30 V. Cuando se selecciona el transductor, es necesario medir correctamente la señal de corriente para proporcionar una representación precisa de la presión aplicada a el transmisor.
Selección de un dispositivo de adquisición de datos para la medición de corriente
Un aspecto importante al que prestar atención al construir un sistema de corriente es evitar la aparición de un bucle de corriente en el circuito de tierra. Una técnica común en tales casos es el aislamiento. Al usar aislamiento, puede evitar la influencia del bucle de tierra, cuya aparición se explica en la Fig.3.
Fig. 3. Bucle de tierra
Los bucles de tierra se forman cuando dos terminales están conectados en un circuito en diferentes ubicaciones potenciales. Esta diferencia provoca la aparición de corriente adicional en la línea de comunicación, lo que puede provocar errores en las medidas.
El aislamiento de adquisición se refiere a la separación eléctrica de la tierra de la fuente de señal de la tierra del amplificador de entrada del dispositivo de medición, como se muestra en la Figura 4.
Dado que no puede fluir corriente a través de la barrera de aislamiento, los puntos de tierra del amplificador y la fuente de señal tienen el mismo potencial. Esto elimina la posibilidad de crear inadvertidamente un bucle de tierra.
Figura 4. Voltaje de modo común y voltaje de señal en un circuito aislado
El aislamiento también evita daños al recolector de datos en presencia de voltajes de modo común altos. El modo común es un voltaje de la misma polaridad que está presente en ambas entradas de un amplificador de instrumentación. Por ejemplo, en la Fig.4. Tanto las entradas del amplificador positivas (+) como las negativas (-) tienen un voltaje de modo común de +14 V. Muchos recolectores de datos tienen un rango de entrada máximo de ± 10 V. Si el recolector de datos no está aislado y el voltaje de modo común está fuera del rango de entrada máximo, podría dañar el dispositivo. Aunque el voltaje normal (señal) en la entrada del amplificador en la Figura 4 es solo +2 V, agregar +14 V puede resultar en +16 V
(El voltaje de señal es el voltaje entre el "+" y "-" del amplificador, el voltaje de operación es la suma de los voltajes de modo normal y común), lo que representa un nivel de voltaje peligroso para colectores con voltajes de operación más bajos.
Con aislamiento, el punto común del amplificador está eléctricamente separado de la referencia de tierra. En el circuito de la Figura 4, el potencial en el punto común del amplificador se "eleva" a un nivel de +14 V. Esta técnica conduce al hecho de que el valor del voltaje de entrada cae de 16 a 2 V. Ahora datos colección, el dispositivo ya no corre el riesgo de daños por sobretensión. (Tenga en cuenta que los aisladores tienen el voltaje máximo en modo común que pueden rechazar).
Una vez que el recolector de datos está aislado y protegido, el paso final para completar el bucle de corriente es seleccionar una fuente de alimentación adecuada.
Selección de fuente de alimentación
Determine qué fuente de alimentación la mejor manera cumple con sus requisitos de forma muy sencilla. Cuando se trabaja en un bucle de corriente, la fuente de alimentación debe entregar un voltaje igual o mayor que la suma de las caídas de voltaje en todos los elementos del sistema.
El recolector de datos en nuestro ejemplo usa una derivación de precisión para medir la corriente.
Es necesario calcular la caída de voltaje a través de esta resistencia. Una resistencia de derivación típica tiene una resistencia de 249 Ω. Cálculos básicos para un rango de corriente en el bucle de corriente de 4 .. 20 mA
mostrar lo siguiente:
Yo * R = U
0,004 A * 249 Ω = 0,996 V
0,02 A * 249 Ω = 4,98 V
Con una derivación con una resistencia de 249 Ω, podemos eliminar un voltaje en el rango de 1 a 5 V vinculando el voltaje en la entrada del colector de datos con el valor de la señal de salida del transductor de presión.
Como se mencionó anteriormente, el transductor de presión requiere un voltaje de operación mínimo de 12 V con un máximo de 30 V. Al agregar la caída de voltaje a través de la resistencia de derivación de precisión al voltaje de operación del transductor, se obtiene lo siguiente:
12V + 5V = 17V
A primera vista es suficiente un voltaje de 17 V. Sin embargo, es necesario tener en cuenta la carga adicional en la fuente de alimentación, que es creada por cables que tienen resistencia eléctrica.
En los casos en que el sensor está lejos de instrumentos de medición, debe tener en cuenta el factor de resistencia de los cables al calcular el bucle de corriente. Los cables de cobre tienen una resistencia de CC que es directamente proporcional a su longitud. Con el transductor de presión de este ejemplo, debe tener en cuenta los 2000 pies de longitud del enlace al determinar el voltaje de funcionamiento de la fuente de alimentación. Resistencia lineal del cable de cobre sólido 2,62 Ω / 100 pies. Teniendo en cuenta esta resistencia se obtiene lo siguiente:
La resistencia de un núcleo de 2,000 pies de largo es 2,000 * 2.62 / 100 = 52.4 m.
La caída de voltaje en un núcleo será 0.02 * 52.4 = 1.048 V.
Para completar el circuito, se necesitan dos cables, luego se duplica la longitud de la línea de comunicación y
la caída total de voltaje será de 2.096 V. Esto da como resultado aproximadamente 2.1 V debido a la distancia de 2,000 pies desde el transmisor hasta la corriente descendente. Resumiendo las caídas de voltaje en todos los elementos del circuito, obtenemos:
2,096 V + 12 V + 5 V = 19,096 V
Si usó 17 V para alimentar este circuito, entonces el voltaje suministrado al transductor de presión estará por debajo del voltaje operativo mínimo debido a la caída a través de la resistencia del cable y la resistencia de derivación. La elección de una fuente de alimentación típica de 24 V satisfará los requisitos de alimentación del convertidor. Además, existe una reserva de tensión para colocar el sensor de presión a mayor distancia.
Con la selección del transductor, dispositivo de adquisición, longitudes de cable y fuente de alimentación adecuados, se completa el diseño del bucle de corriente simple. Para aplicaciones más complejas, puede incluir canales de medición adicionales en el sistema.
Conexión del sensor de corriente al microcontrolador
Habiéndonos familiarizado con los fundamentos de la teoría, podemos pasar al tema de la lectura, transformación y visualización de datos. En otras palabras, diseñaremos un medidor de CC simple.
La salida analógica del sensor está conectada a uno de los canales ADC del microcontrolador. Todas las transformaciones y cálculos necesarios se implementan en el programa del microcontrolador. Se utiliza una pantalla LCD de caracteres de 2 líneas para mostrar los datos.
Circuito experimental
Para los experimentos con un sensor de corriente, es necesario ensamblar una estructura de acuerdo con el diagrama que se muestra en la Figura 8. Para ello, el autor utilizó un tablero y un módulo basado en un microcontrolador (Figura 9).
El módulo de sensor de corriente ACS712-05B se puede comprar listo para usar (se vende a un precio muy bajo en eBay), o puede hacer el suyo propio. La capacitancia del condensador del filtro se elige igual a 1 nF; se instala un condensador de bloqueo de 0,1 μF en la fuente de alimentación. Se suelda un LED con una resistencia de amortiguación para indicar que la energía está encendida. La fuente de alimentación y la señal de salida del sensor están conectadas a un conector en un lado de la placa del módulo, un conector de 2 pines para medir la corriente que fluye se encuentra en el lado opuesto.
Para experimentos de medición de corriente, conectamos una fuente de voltaje constante ajustable a los terminales de medición de corriente del sensor a través de una resistencia en serie de 2.7 Ohm / 2 W. La salida del sensor está conectada al puerto RA0 / AN0 (pin 17) del microcontrolador. Una pantalla LCD de caracteres de dos líneas está conectada al puerto B del microcontrolador y funciona en modo de 4 bits.
El microcontrolador está alimentado por +5 V, el mismo voltaje se usa como referencia para el ADC. Los cálculos y transformaciones necesarios se implementan en el programa del microcontrolador.
Las expresiones matemáticas utilizadas en el proceso de conversión se muestran a continuación.
Sensibilidad del sensor de corriente Sens = 0,185 V / A. Con Vcc = 5 V de alimentación y Vref = 5 V de referencia, las relaciones calculadas son las siguientes:
Código de salida ADC


Por eso
Como resultado, la fórmula para calcular la corriente es la siguiente:
Nota IMPORTANTE. Las relaciones anteriores se basan en la suposición de que el voltaje de suministro de ADC y el voltaje de referencia son 5 V. Sin embargo, la última expresión, que relaciona la corriente I y el código de salida del recuento de ADC, es válida incluso con fluctuaciones en el voltaje de suministro. Esto se discutió en la parte teórica de la descripción.
La última expresión muestra que la resolución actual del sensor es 26,4 mA, lo que corresponde a 513 recuentos de ADC, que es un recuento más alto que el resultado esperado. Así, podemos concluir que esta implementación no permite medir pequeñas corrientes. Para aumentar la resolución y aumentar la sensibilidad al medir corrientes bajas, se requiere el uso de un amplificador operacional. En la Figura 10 se muestra un ejemplo de dicho circuito.
Programa de microcontrolador
El programa del microcontrolador PIC16F1847 está escrito en C y compilado en el entorno mikroC Pro (mikroElektronika). Los resultados de la medición se muestran en una pantalla LCD de dos líneas con una precisión de dos decimales.
Producción
Con corriente de entrada cero, el voltaje de salida del ACS712 idealmente debería ser estrictamente Vcc / 2, es decir, se debe leer del ADC el número 512. Una desviación del voltaje de salida del sensor en 4.9 mV provoca un cambio en el resultado de conversión en 1 bit menos significativo del ADC (Figura 11). (Para Vref = 5,0 V, la resolución de un ADC de 10 bits será 5/1024 = 4,9 mV), que corresponde a 26 mA de corriente de entrada. Tenga en cuenta que para reducir la influencia de las fluctuaciones, es conveniente realizar varias mediciones y luego promediar sus resultados.
Si el voltaje de salida de la fuente de alimentación regulada se establece en 1 V, a través de
la resistencia debe tener una corriente de aproximadamente 370 mA. El valor medido de la corriente en el experimento es 390 mA, que excede el resultado correcto en una unidad del bit menos significativo del ADC (Figura 12).
|
|
|
| Figura 12. | |

A un voltaje de 2 V, el indicador mostrará 760 mA.
Con esto concluye nuestra discusión sobre el sensor de corriente ACS712. Sin embargo, no hemos abordado un tema más. ¿Cómo medir la corriente alterna con este sensor? Tenga en cuenta que el sensor proporciona una respuesta instantánea correspondiente a la corriente que fluye a través de los cables de prueba. Si la corriente fluye en la dirección positiva (de los pines 1 y 2 a los pines 3 y 4), la sensibilidad del sensor es positiva y el voltaje de salida es mayor que Vcc / 2. Si la corriente cambia de dirección, la sensibilidad será negativa y el voltaje de salida del sensor caerá por debajo de Vcc / 2. Esto significa que al medir una señal de CA, el ADC del microcontrolador debe muestrear lo suficientemente rápido para poder calcular la corriente rms.
Descargas
El código fuente del programa del microcontrolador y el archivo del firmware -
Aquí mencioné por separado un tema práctico tan importante como la conexión de sensores inductivos con una salida de transistor, que son omnipresentes en los equipos industriales modernos. Además, se proporcionan instrucciones reales para los sensores y enlaces a ejemplos.
El principio de activación (operación) de los sensores en este caso puede ser cualquiera: inductivo (aproximación), óptico (fotoeléctrico), etc.
En la primera parte, se describieron las posibles opciones para las salidas de los sensores. No debería haber problemas con la conexión de sensores con contactos (salida de relé). Y en términos de transistor y conexión al controlador, no es tan simple.
Diagramas de conexión para sensores PNP y NPN
La diferencia entre los sensores PNP y NPN es que cambian diferentes polos de la fuente de alimentación. PNP (de la palabra "Positivo") conmuta la salida positiva de la fuente de alimentación, NPN - negativo.
A continuación, a modo de ejemplo, se dan los diagramas de conexión para sensores con salida de transistor. Carga: como regla, esta es la entrada del controlador.
Sensor. La carga (carga) está conectada permanentemente a "menos" (0 V), el suministro de "1" discreto (+ V) se conmuta mediante un transistor. Sensor NO o NC - depende del circuito de control (circuito principal)
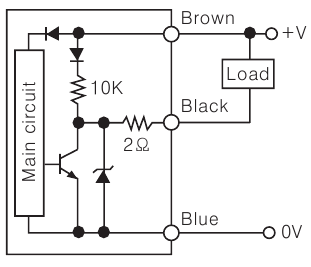
Sensor. La carga (carga) está conectada permanentemente a “más” (+ V). Aquí el nivel activo (discreto “1”) en la salida del sensor es bajo (0V), mientras que la carga recibe energía a través del transistor abierto.
Insto a todos a que no se confundan, el trabajo de estos esquemas se detallará a continuación.
Los siguientes diagramas muestran lo mismo en principio. El énfasis está en las diferencias en los circuitos de salida PNP y NPN.

Diagramas de conexión para salidas de sensor NPN y PNP
La figura de la izquierda muestra un sensor con un transistor de salida. NPN... Se conmuta el cable común, que en este caso es el cable negativo de la fuente de alimentación.
Derecha - caja del transistor PNP a la salida. Este caso es el más frecuente, ya que en la electrónica moderna se acostumbra hacer común el cable negativo de la fuente de alimentación, y activar las entradas de controladores y otros dispositivos de grabación con potencial positivo.
¿Cómo comprobar un sensor inductivo?
Para hacer esto, debe suministrarle energía, es decir, conectarlo al circuito. Entonces - actívelo (inícielo). El indicador se iluminará cuando se active. Pero la indicación no garantiza trabajo correcto Sensor inductivo. Debe conectar la carga y medir el voltaje a través de ella para estar 100% seguro.
Reemplazo de sensores
Como ya escribí, hay básicamente 4 tipos de sensores con una salida de transistor, que se subdividen según estructura interna y el diagrama de conexión:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Todos estos tipos de sensores se pueden reemplazar entre sí, es decir, son intercambiables.
Esto se hace de las siguientes formas:
- Alteración del dispositivo de iniciación: el diseño se cambia mecánicamente.
- Cambio del circuito de conmutación del sensor existente.
- Cambio del tipo de salida del sensor (si hay tales interruptores en el cuerpo del sensor).
- Reprogramar un programa: cambiar el nivel activo esta entrada, cambiando el algoritmo del programa.
A continuación se muestra un ejemplo de cómo puede reemplazar un sensor PNP por uno NPN cambiando el diagrama de cableado:

Esquemas de intercambiabilidad PNP-NPN. A la izquierda está el circuito original, a la derecha está el reelaborado.
Comprender el funcionamiento de estos circuitos ayudará a comprender el hecho de que el transistor es un elemento clave que puede representarse mediante contactos de relé ordinarios (los ejemplos se encuentran a continuación, en la notación).
Entonces, el diagrama está a la izquierda. Suponga que el tipo de sensor es NO. Entonces (independientemente del tipo de transistor en la salida), cuando el sensor no está activo, sus “contactos” de salida están abiertos y no fluye corriente a través de ellos. Cuando el sensor está activo, los contactos se cierran, con todas las consecuencias consiguientes. Más precisamente, con una corriente fluyendo a través de estos contactos)). La corriente que fluye crea una caída de voltaje a través de la carga.
La carga interna se muestra con una línea de puntos por una razón. Esta resistencia existe, pero su presencia no garantiza un funcionamiento estable del sensor, el sensor debe estar conectado a la entrada del controlador u otra carga. La resistencia de esta entrada es la carga principal.
Si no hay carga interna en el sensor y el colector está "en el aire", esto se denomina "circuito de colector abierto". Este circuito SOLO funciona con una carga conectada.
Entonces, en un circuito con una salida PNP, al activarse, el voltaje (+ V) a través del transistor abierto se alimenta a la entrada del controlador y se activa. ¿Cómo haces lo mismo con NPN?
Hay situaciones en las que sensor deseado no a mano, pero la máquina debería funcionar "ahora mismo".
Observamos los cambios en el diagrama de la derecha. En primer lugar, se proporciona el modo de funcionamiento del transistor de salida del sensor. Para esto, se agrega una resistencia adicional al circuito, su resistencia suele ser de aproximadamente 5.1 - 10 kOhm. Ahora, cuando el sensor no está activo, a través de una resistencia adicional se suministra voltaje (+ V) a la entrada del controlador y se activa la entrada del controlador. Cuando el sensor está activo, hay un "0" discreto en la entrada del controlador, ya que la entrada del controlador es derivada por un transistor NPN abierto, y casi toda la corriente de la resistencia adicional pasa a través de este transistor.
En este caso, hay un cambio de fase del sensor. Pero el sensor funciona en el modo y el controlador recibe información. En la mayoría de los casos, esto es suficiente. Por ejemplo, en el modo de conteo de pulsos: un tacómetro o el número de espacios en blanco.
Sí, no es exactamente lo que queríamos, y los esquemas de intercambiabilidad de los sensores npn y pnp no siempre son aceptables.
¿Cómo lograr la funcionalidad completa? Método 1: mueva o rehaga mecánicamente la placa de metal (activador). O el espacio de luz en el caso de un sensor óptico. Método 2: reprograme la entrada del controlador de modo que el "0" discreto sea el estado activo del controlador y el "1" sea pasivo. Si tiene una computadora portátil a mano, el segundo método es más rápido y más fácil.
Símbolo del sensor de proximidad
Sobre diagramas esquemáticos Los sensores inductivos (sensores de proximidad) se designan de manera diferente. Pero lo principal es que hay un cuadrado girado 45 ° y dos líneas verticales en él. Como en los diagramas siguientes.

Sensores NO NC. Diagramas esquemáticos.
El diagrama superior muestra un contacto normalmente abierto (NO) (convencionalmente designado como transistor PNP). El segundo circuito está normalmente cerrado y el tercer circuito son ambos contactos en la misma carcasa.
Codificación de colores de los cables del sensor
Existe un sistema estándar para etiquetar sensores. Todos los fabricantes se adhieren actualmente a él.
Sin embargo, es útil asegurarse de que la conexión sea correcta antes de la instalación consultando el manual de conexión (instrucciones). Además, como regla general, los colores de los cables se indican en el propio sensor, si su tamaño lo permite.
Esta es la marca.
- Azul (azul) - Menos potencia
- Marrón - Plus
- Negro - Salida
- Blanco: la segunda salida o entrada de control, necesitas mirar las instrucciones.
Sistema de designación de sensor inductivo
El tipo de sensor se designa mediante un código alfanumérico en el que se cifran los principales parámetros del sensor. A continuación se muestra el sistema de etiquetado para los sensores Autonics más populares.

Descargue instrucciones y manuales para algunos tipos de sensores inductivos: Me encuentro en mi trabajo.
Gracias a todos por su atención, ¡estoy esperando preguntas sobre la conexión de sensores en los comentarios!
Los sensores más utilizados en el campo de la automatización industrial con una salida de corriente unificada de 4-20, 0-50 o 0-20 mA pueden tener varios esquemas conexiones a dispositivos secundarios. Los sensores modernos con bajo consumo de energía y una salida de corriente de 4-20 mA se conectan con mayor frecuencia en un circuito de dos cables. Es decir, solo un cable con dos núcleos está conectado a dicho sensor, a través del cual se alimenta este sensor, y la transmisión se realiza a lo largo de los mismos dos núcleos.
Normalmente, los sensores con salida de 4-20 mA y conexión de dos cables tienen una salida pasiva y requieren una fuente de alimentación externa para funcionar. Esta fuente de alimentación se puede integrar directamente en el dispositivo secundario (en su entrada) y cuando el sensor está conectado a dicho dispositivo, aparece inmediatamente una corriente en el circuito de señal. Se dice que los dispositivos que tienen una fuente de alimentación para el sensor incorporada en la entrada son dispositivos con una entrada activa.
La mayoría de los instrumentos y controladores secundarios modernos tienen fuentes de alimentación integradas para trabajar con sensores con salidas pasivas.

Si el dispositivo secundario tiene una entrada pasiva, de hecho, solo una resistencia desde la cual el circuito de medición del dispositivo "lee" la caída de voltaje proporcional a la corriente que fluye en el circuito, entonces se necesita un sensor adicional para que funcione el sensor. En este caso, la unidad de fuente de alimentación externa se conecta en serie con el sensor y el dispositivo secundario para romper el bucle de corriente.

Los dispositivos secundarios generalmente se diseñan y fabrican de tal manera que se pueden conectar tanto a sensores de 4-20 mA de dos cables como a sensores de 0-5, 0-20 o 4-20 mA conectados en un circuito de tres cables. Para conectar un sensor de dos hilos a la entrada de un dispositivo secundario con tres terminales de entrada (+ U, entrada y común), use los terminales "+ U" y "entrada", el terminal "común" permanece libre.

Dado que los sensores, como ya se mencionó anteriormente, pueden tener no solo una salida de 4-20 mA, sino, por ejemplo, 0-5 o 0-20 mA, o no pueden conectarse en un circuito de dos cables debido a su gran energía consumo (más de 3 mA), luego se utiliza un esquema de conexión de tres cables. En este caso, los circuitos de alimentación del sensor y los circuitos de señal de salida están separados. Los sensores con una conexión de tres cables suelen tener una salida activa. Es decir, si se aplica un voltaje de suministro al sensor con una salida activa y se conecta una resistencia de carga entre su salida y los terminales de salida común, entonces una corriente proporcional al valor del parámetro medido se ejecutará en el circuito de salida.

Los dispositivos secundarios suelen tener una fuente de alimentación incorporada de baja potencia para alimentar los sensores. La corriente de salida máxima de las fuentes de alimentación incorporadas suele estar en el rango de 22-50 mA, que no siempre es suficiente para alimentar sensores con alto consumo de energía: medidores de flujo electromagnéticos, analizadores de gases infrarrojos, etc. En este caso, para alimentar el sensor de tres cables, debe utilizar una unidad de fuente de alimentación externa más potente que proporcione la energía necesaria. No se utiliza la fuente de alimentación incorporada en el secundario.

Un circuito similar para encender sensores de tres cables se usa generalmente cuando el voltaje de la fuente de alimentación incorporada en el dispositivo no se corresponde con el voltaje de suministro que se permite suministrar a este sensor. Por ejemplo, la fuente de alimentación incorporada tiene un voltaje de salida de 24 V y el sensor puede alimentarse con un voltaje de 10 a 16 V.
Algunos dispositivos secundarios pueden tener múltiples canales de entrada y una fuente de alimentación que sea lo suficientemente potente como para alimentar sensores externos. Debe recordarse que el consumo total de energía de todos los sensores conectados a dicho dispositivo multicanal debe ser menor que la energía de la fuente de energía incorporada destinada a su fuente de alimentación. Además, al estudiar las características técnicas del dispositivo, es necesario distinguir claramente el propósito de las unidades de fuente de alimentación (fuentes) integradas en él. Una fuente incorporada se utiliza para alimentar directamente el dispositivo secundario en sí, para operar la pantalla y los indicadores, los relés de salida, el circuito electrónico del dispositivo, etc. Esta fuente de alimentación puede ser bastante potente. La segunda fuente incorporada se utiliza para alimentar solo los circuitos de entrada: los sensores conectados a las entradas.
Antes de conectar el sensor al dispositivo secundario, debe estudiar cuidadosamente las instrucciones de funcionamiento de este equipo, determinar los tipos de entradas y salidas (activas / pasivas), verificar la correspondencia de la potencia consumida por el sensor y la potencia de la fuente de alimentación (incorporado o externo), y solo entonces realice la conexión. Las designaciones reales de los terminales de entrada y salida de los sensores y dispositivos pueden diferir de las indicadas anteriormente. Entonces, los terminales "Bx (+)" y "Bx (-)" pueden tener la designación + J y -J, + 4-20 y -4-20, + In y -In, etc. El terminal "+ U pit" se puede designar como + V, Suministro, + 24V, etc., el terminal "Salida" - Salida, Señal, Jout, 4-20 mA, etc., el terminal "común" - GND, -24V, 0V, etc., pero esto no cambia el significado.
Los sensores con una salida de corriente que tienen un esquema de conexión de cuatro cables tienen el mismo esquema de conexión que los sensores de dos cables con la única diferencia de que los sensores de cuatro cables se alimentan a través de un par de cables separados. Además, los sensores de cuatro cables pueden tener ambos, lo que debe tenerse en cuenta al elegir un diagrama de cableado.